
|
[2011 年 8 月号] |
[技術講座]

先月号 に続き、東京連合 ( ET ロボコン東京地区コミュニティ活動 ) の集会の模様を紹介します。第 2 回集会では、難所攻略に焦点を当て、攻略法や必要となる要素技術について検討を行いました。また、南関東地区からも 2 チームが参加し、地区の垣根を越えた交流も生まれました。
尚、本記事は ET ロボコンに参加する方を想定した内容となっています。ET ロボコンをご存じない方は ET ロボコン概要 をご覧ください。
第 2 回集会は、グループワークを中心に行いました。まず議論の呼び水として、難所攻略法をお題とした個人発表をした後、難所毎にグループに分かれ検討を行い、最後に検討した結果を発表してもらいました。
グループ分けの際は、交流の意味も込めて、各グループがなるべく異なるチームのメンバで構成されるよう振り分けました。初対面のメンバも多かったものの、全員が「 大会で上位入賞を目指す 」同志ということもあり、すぐに打ち解け、活発な議論が交わされていました。
| 内容 | 時間 |
|---|---|
| 個人発表 | 75 分 ( 5 人 × 15 分 ) |
| 休憩 | 15 分 |
| グループワーク | 90 分 |
| 休憩 | 15 分 |
| グループ発表 | 75 分 ( 5 グループ × 15 分 ) |
| 合計 | 4 時間 30 分 |


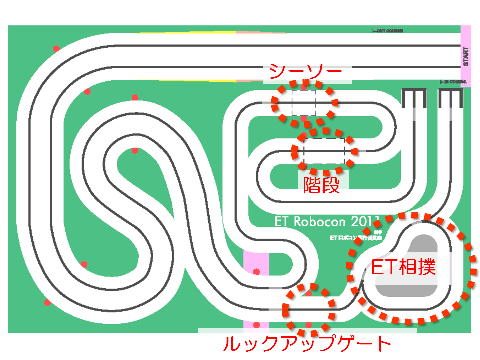
以降では、個人・グループ発表で挙がった内容の中から、難所の代表的な走り方とその際の課題についていくつか紹介します。今回検討の対象とした難所は、シーソー、階段、ET 相撲、ルックアップゲートの 4 つです。
尚、本記事ではあえて、課題の解決策には触れていません。そこはぜひ、大会当日会場へ足を運び、本番レースや展示されたモデルシートを見て確かめてください。また観戦のみされる方も、ぜひ自分なりの難所攻略法を考えた上で見ることをオススメします。各チームの難所攻略法と比較しながら見ることで、大会を一層楽しめるはずです。
 シーソー
|
 階段
|
 ET 相撲
|
 ルックアップゲート
|
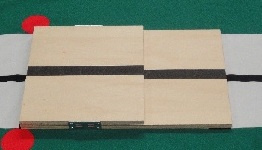
シーソーは、レーンの幅が狭まったこと ( 3 cm → 2 cm ) を除き、構造は昨年と同じです。新たなボーナス対象として「 シーソーダブル 」が加わりました。これは、走行体がシーソーに乗った状態で、シーソーを動かし、終端接地→始端接地→終端接地を行うことでボーナスタイムが付与されます。詳しくは ET ロボコン競技規約 をご覧ください。
|
「 シーソー通過 ( シーソーダブル ) 」の代表的な走り方と、その際の課題をいくつか紹介します。
| ?@ | 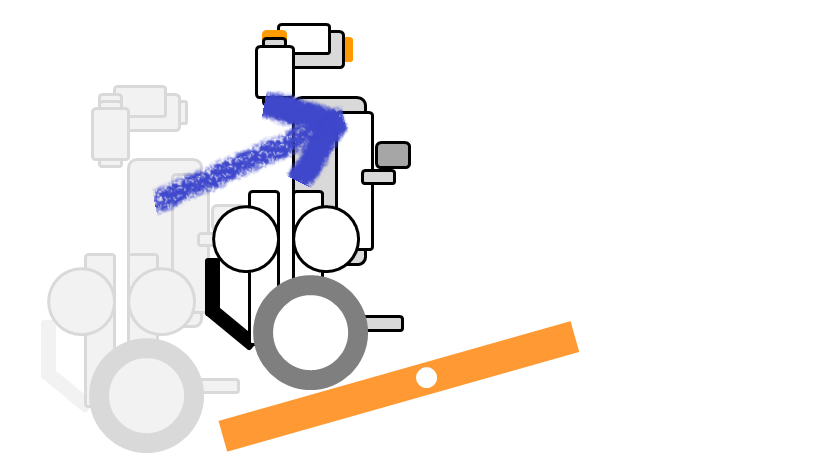 |
シーソーに乗る 【課題】 ・シーソーに乗る際の衝撃でジャイロセンサにノイズが生じ、倒立制御が乱れて倒れやすい。 ・両輪揃えて乗らないと、走行体の向きがずれてレーンを逸れやすい。 |
| ?A | 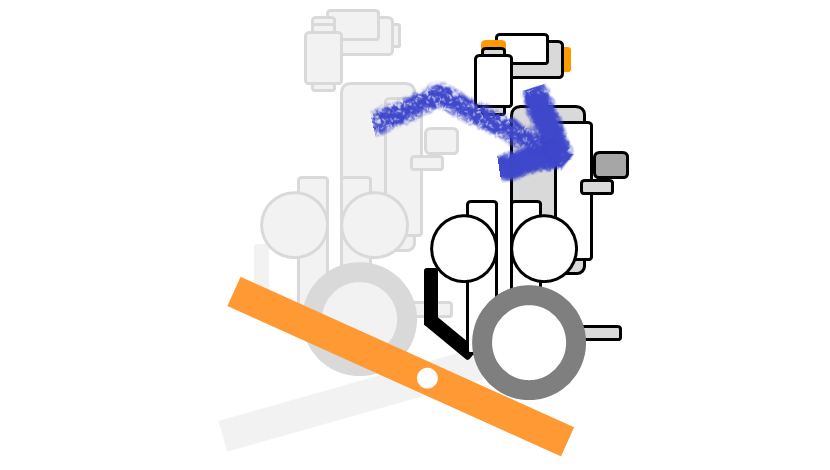 |
前に進み、終端が接地したら止まる 【課題】 ・シーソーから落ちないよう、シーソーが動いたことを知り、止まる必要がある。 |
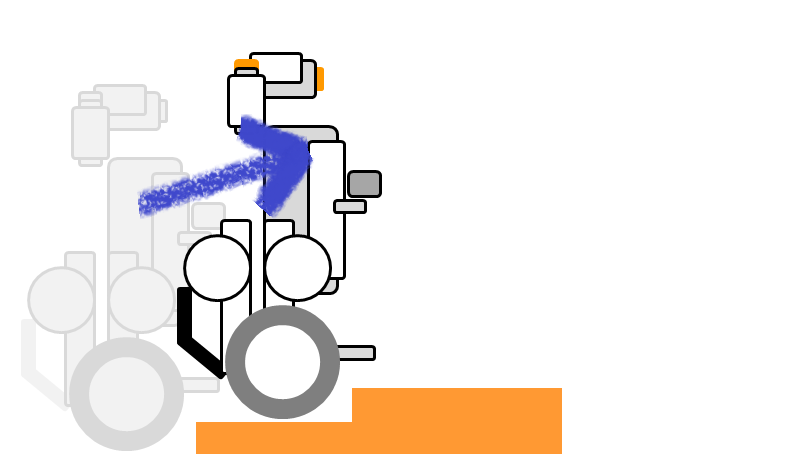
| ?B | 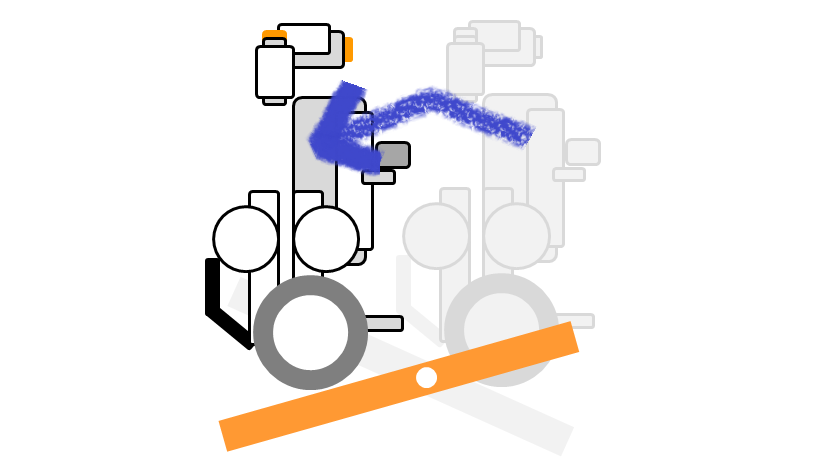 |
後ろに下がり、始端が接地したら止まる 【課題】 ・シーソーから落ちないよう、シーソーが動いたことを知り、止まる必要がある。 ・光センサ ( レーン認識に使用 ) が車軸より前に付いているため、後ろに下がる際のライントレースが難しく、レーンを逸れやすい。 |
| ?C | 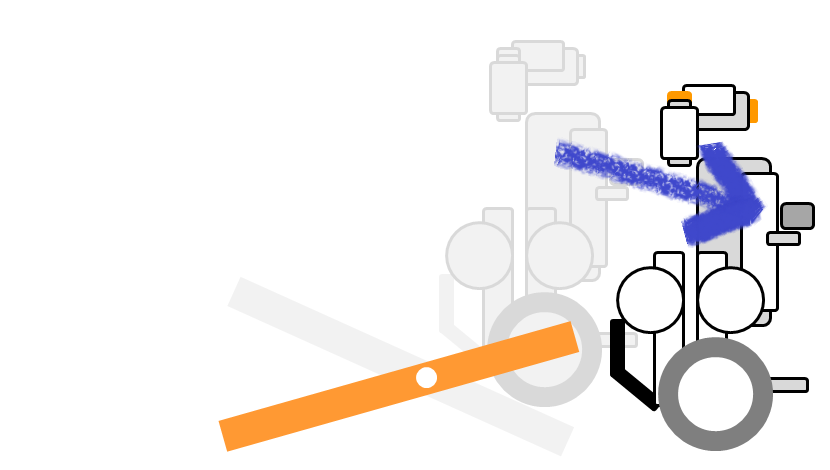 |
シーソーを降りる 【課題】 ・降りる際の勢いでバランスを崩して倒れやすい。 ・跳ね上がるシーソーが走行体の尻尾に当たり倒れやすい。 |

階段は、レーンの幅が狭まったこと ( 3 cm → 2 cm ) を除き、構造は昨年と同じです。階段付近のゲートを通過することでボーナスタイムが付与されます。詳しくは ET ロボコン競技規約 をご覧ください。
|
「 階段通過 」の代表的な走り方と、その際の課題をいくつか紹介します。
| ?@ |  |
階段を上がる 【課題】 ・階段を上がる際の衝撃でジャイロセンサにノイズが生じ、倒立制御が乱れて倒れやすい。 ・両輪揃えて上がらないと、走行体の向きがずれてレーンを逸れやすい。 |
| ?A | 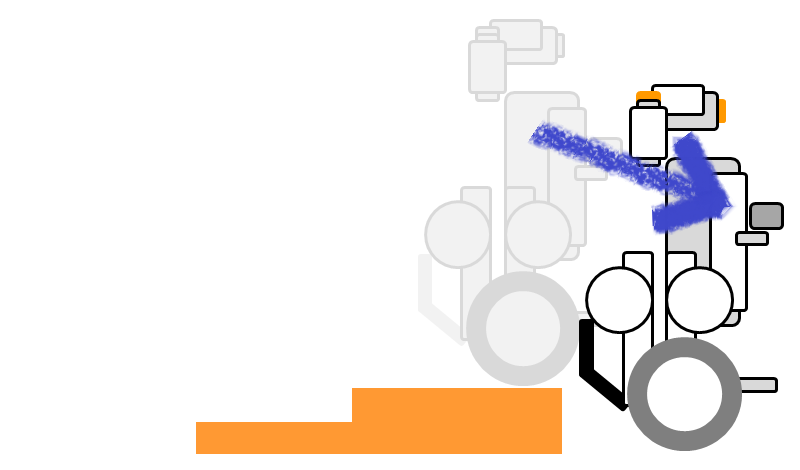 |
階段を下りる 【課題】 ・下りる際の勢いでバランスを崩して倒れやすい。 |

ET 相撲は、今年初お目見えした難所です。灰色エリアに置かれるペットボトルを相手力士に見立て、黒レーンで囲まれるエリアを土俵に見立て、ペットボトルを土俵外へ押し出す、あるいは土俵内で押し倒すことでボーナスタイムが付与されます。詳しくは ET ロボコン競技規約 をご覧ください。
|
「 ET 相撲 ( 押し出し ) 」の代表的な走り方と、その際の課題をいくつか紹介します。
| ?@ |  |
探索するポイント ( 任意 ) で止まる 【課題】 ・正確に探索ポイントで止まる必要がある。 |
| ?A | 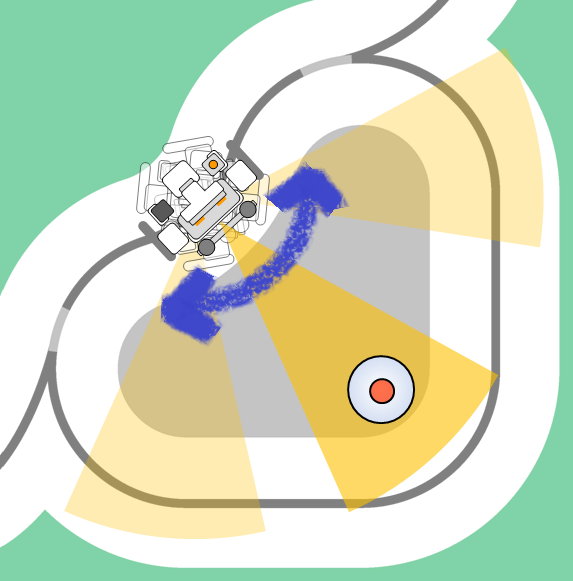 |
回転してペットボトルを探す 【課題】 ・コース上のオブジェ ( 緑ゾーンに置かれる ) をペットボトルと間違えやすい。 ・ペットボトルが見つからないかもしれない。 |
| ?B | 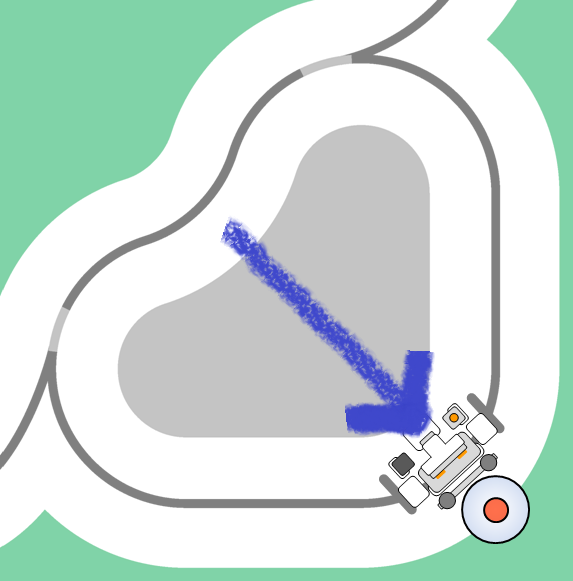 |
ペットボトルを押し出す 【課題】 ・強く当たるとペットボトルが倒れてしまう ( 押し倒しになってしまう )。 ・押している途中でペットボトルが走行体の脇をすり抜けるかもしれない。 ・時間をかけ過ぎると、競技制限時間 ( 2 分 ) を超えてしまう。 |
| ?C | 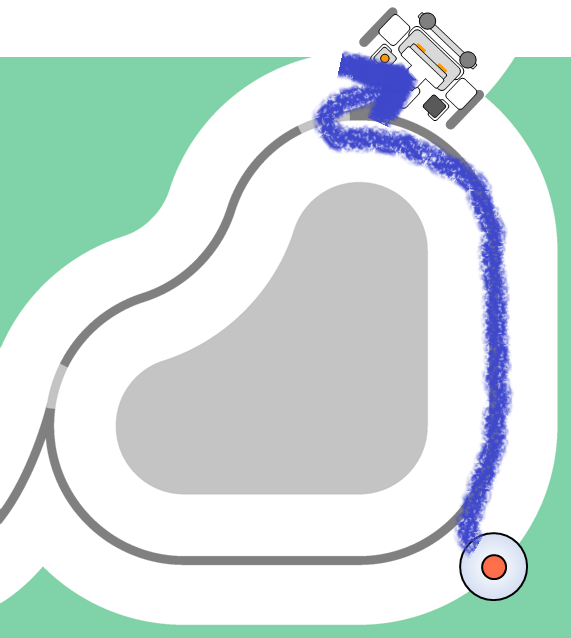 |
レーンを見つけ、コースに復帰する 【課題】 ・レーン上にペットボトルを倒してしまうと、走行体の進路を妨害してしまう。 |
ルックアップゲートは、今年初お目見えした難所です。リンボーダンスをするように走行体を後ろに傾け、ゲートに接触せずに通過することでボーナスタイムが付与されます。詳しくは ET ロボコン競技規約 をご覧ください。
|
「 ルックアップゲート通過 」の代表的な走り方と、その際の課題をいくつか紹介します。
| ?@ | 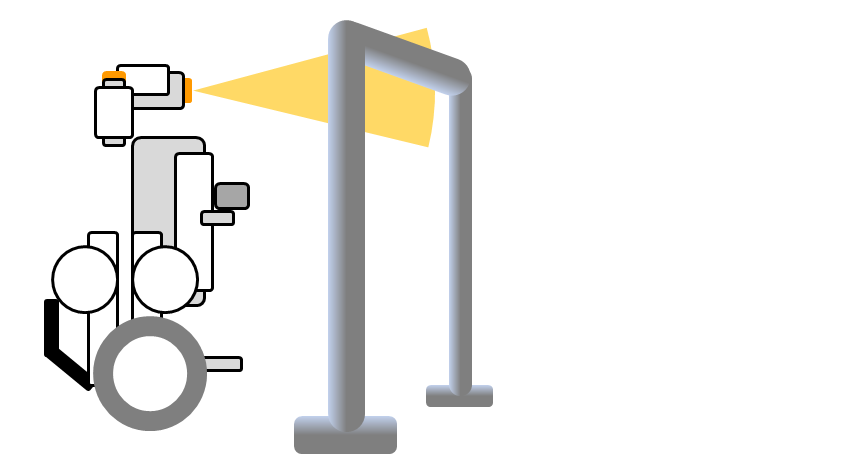 |
ゲートに近づく |
| ?A | 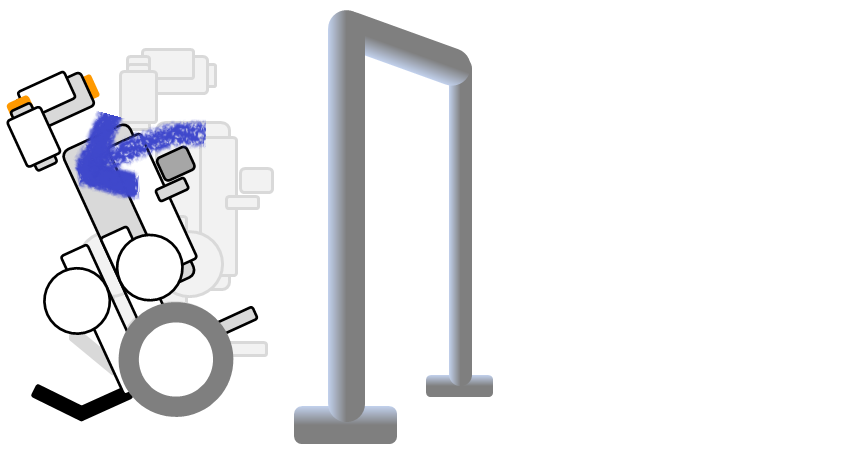 |
後ろに傾ける 【課題】 ・傾きを維持する際の尻尾根元に付いたモータの力加減が難しい。 |
| ?B | 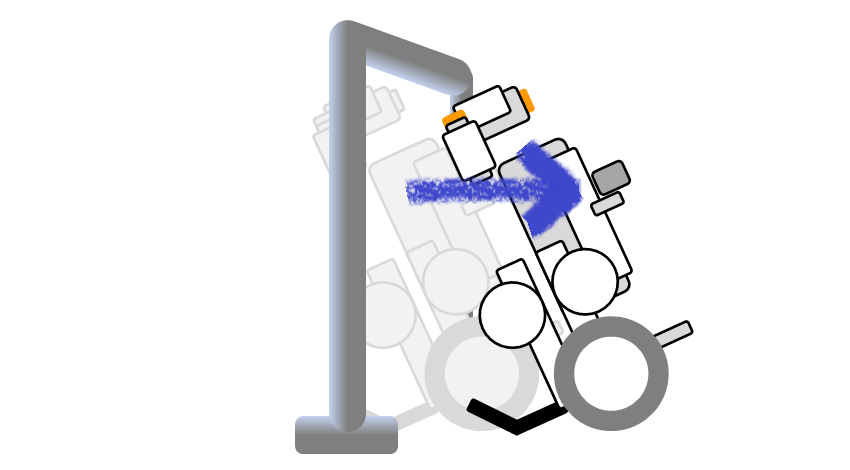 |
ゲートを通過する 【課題】 ・傾いた姿勢ではライントレースが難しく、レーンを逸れやすい。 ・傾いた姿勢では車輪が滑りやすく、まっすぐ走りづらい。 |
| ?C | 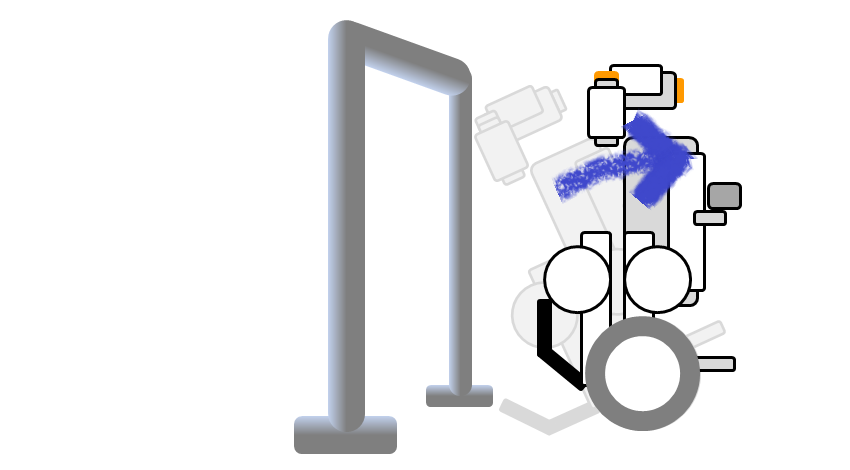 |
起き上がる 【課題】 ・徐々に起き上がる際の尻尾根元に付いたモータの力加減が難しい。 ・倒立姿勢へ戻る際にバランスを崩して倒れやすい。 |

難所攻略する上での課題を紹介しましたが、いかがでしたでしょうか。ET ロボコンの面白さや奥深さを感じてもらえたなら幸いです。また大会本番では、画期的で思いも寄らない攻略法がさまざま見られるはずです。ぜひ会場へ足を運び、その目で確かめてみてください。
| © 2011 OGIS-RI Co., Ltd. |
|