
|
[2011 年 10 月号] |
[技術講座]
 |
 |
 |
2011 年 9 月 23 日 ( 金 ) と 24 日 ( 土 ) の 2 日間、工学院大学において 「 ET ロボコン 2011 東京地区大会 」 が行われました。当記事では、大会の様子や結果をレポートします。
尚、本記事は ET ロボコンに参加する方を想定した内容となっています。ET ロボコンをご存じない方は、はじめにET ロボコン概要をご覧ください。
2.2. 非機能要求の分類は「 ソフトウェア品質特性 」が主流
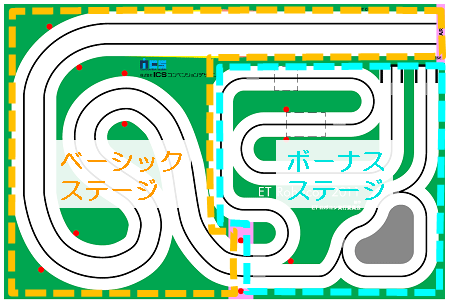
今年は、コースが 2 ステージ制に変更されました。前半は走行タイムを競うベーシックステージ、後半はボーナスタイム ( 難所クリアにより獲得 ) を競うボーナスステージとなり、走行タイムからボーナスタイムを減算したリザルトタイムにより順位が決定します。この変更により、ベーシックステージを完走した時点で走行タイムが決まり、その後の難所でリタイアしても走行タイムが維持されるため、より難所にチャレンジしやすくなりました。
毎年太陽光に悩まされている東京地区大会ですが、その対策にも進展が見られ、今年は、天気に合わせた 2 種類の走り方を用意したチームが見られました。具体的には、晴れた場合 ( 太陽光の影響大 ) に備え、多少速さは犠牲になるものの太陽光の影響を抑えられる「 まいまい式 」を使った安全性重視の走り方と、雨や曇った場合 ( 太陽光の影響小 ) に備え、「 まいまい式 」を使わない速さ重視の走り方を用意していました。どちらの走り方を選ぶかは、当日の天気 ( 太陽光の影響度合い ) を見て判断していました。
少し残念に感じたのは、筆者の見た限り、天気に合わせた走り方を用意したことをコンセプトシートや機能モデルでアピールしたチームが少なかったことです。東京地区大会ならではの対策ですので、ぜひモデルシート上でアピールすることをお勧めします。
気になる完走率 ( ベーシックステージの完走率 ) ですが、筆者の集計では、曇りの A ブロック ( 1 日目 ) が 72.6%、晴れの B ブロック ( 2 日目 ) が 46.3% でした。やはり、天気により完走率に大きな差が出ていました。天気との戦いは来年以降も続きそうです。
 A ブロック ( 1 日目 ) 曇り
|
 B ブロック ( 2 日目 ) 晴れ
|
競技例として、B ブロック ( 2 日目 ) の競技部門で 1 位となった 芝浦雑伎団 の走りを紹介します。タイムは、走行タイム ( 36.1 秒 ) - ボーナスタイム ( 30 秒 ) = リザルトタイム ( 6.1 秒 ) でした。他の地区大会では、リザルトタイムがマイナス秒というチームも出ているそうです。
今年の注目ポイントである「 尻尾 」を活用した走りも見られました。階段を尻尾を使って攻略した リンク二郎同好会 の走りを紹介します。尻尾を接地させ、尻尾と両輪の 3 点で走行体を支えながら段差を安定して登っていました。
今年の走行体は、尻尾を制御するモータの追加によって車重が増し、俊敏さが低下したために、バランスを崩した際の立て直しが苦手という噂を聞きます。特に、バランスを崩す要因となる段差を登る動きが苦手なようで、「 今年最も難しい難所は階段だ 」という参加者もいるほどです。その点、安定して段差を登ることができるこの走りは、尻尾を生かした良い例と言えそうです。
モデルの振り返りや参加者同士の意見交流の場としてワークショップが開かれました。例年と同様、審査委員からは、UML の表記ミスや使い方の誤りなど基礎的な指摘も多く聞かれました。基礎スキルを身に付ける場として、実行委員により技術教育やモデル相談所などが開かれていますので、ぜひ活用することをお勧めします。
以下では、挙がった話題の中から今年ならではの話をいくつか紹介します。
 |
 |
昨年のチャンピオンシップ大会で、ここ数年停滞していると指摘のあったアーキテクチャですが、進化の兆しが見えました。
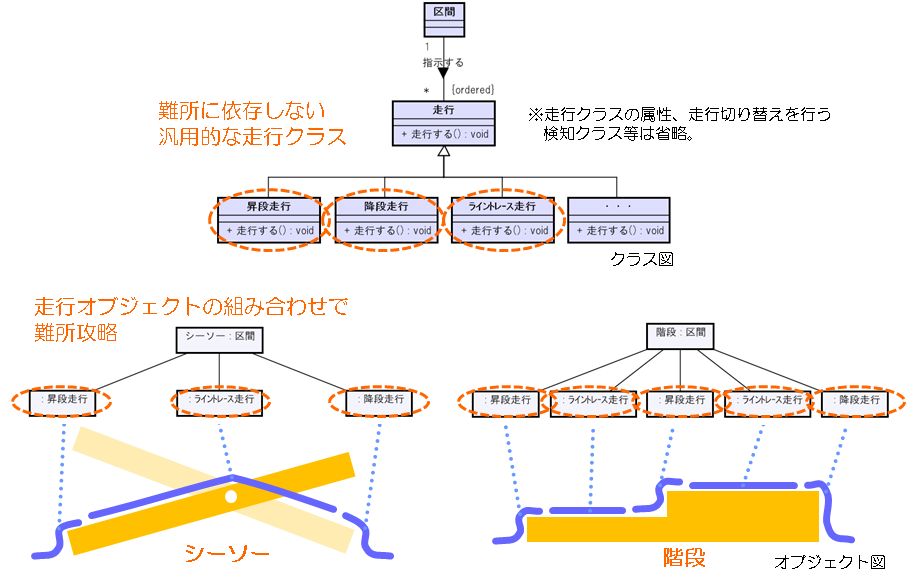
昨年まで多く見られた、難所毎に走行クラスを分けただけの構造ではなく、今年は、難所に依存しない汎用的な走行クラスを出し、走行オブジェクトの組み合わせで難所攻略を実現した構造が見られました。難所毎に走行クラスを分けただけの構造とは違い、同様の走行ロジックやパラメータの点在が抑えられるため、走行変更に伴う影響範囲 ( 修正の必要な箇所 ) を小さくすることができます。他にも、汎用的な走行クラスにしておくことで、将来難所が変わっても、走行クラスの再利用がしやすい ( 再利用性が高まる ) などメリットがあります。
*1基本設計や設計思想、およびそれに基づき構築された構造。
今年から要求モデルが審査対象に加わったことで、要求から機能要求 / 非機能要求を導出する流れはかなり定番化していました。そして、導出した非機能要求を検討する際、ISO 9126 ソフトウェア品質特性に分類したチームが見られたことも特徴です。分類することで、範囲の広い非機能要求を整理して検討することができます。さらに、分類したそれぞれの非機能要求に対し、評価可能な指標を定めたチームも見られました。例えば、「 転倒せずに走行する 」といった主観に基づく指標ではなく、「 転倒率を 10% 以内に抑える 」といった客観的評価の可能な指標を定めていました。また審査委員からは、さらなる改善余地として、「 指標とした数値の根拠まで示せると尚良し 」とアドバイスがありました。
筆者が思うに、非機能要求の分析は、世の中にいくつかガイドラインは存在するものの、まだまだ確立しているとは言い難い状況です。例えば、ソフトウェア品質特性についても、ET ロボコンで挙がる非機能要求を分類する上で必要十分かどうかは分かりません。今後 ET ロボコンを通し、さまざまな試みが行われることで、ET ロボコン、さらには組み込みシステムに適した非機能要求分析のガイドラインが見えてくるのではと期待しています。
A ブロック、 B ブロックの入賞チーム ( 各部門の上位 3 チーム ) は次の通りです。チャンピオンシップ大会へは、各ブロックより、総合部門の上位 5 チームと特別枠として選ばれた 1 チームを合わせた 6 チーム ( 両ブロック合わせると計 12 チーム ) が進出します。
 |
 |
 |
| 順位 | チーム名 | 所属 |
|---|---|---|
| 1 位 | HASH UFO | ( 株 ) 日立製作所 日立研究所 |
| 2 位 | StrayCab06 | ( 株 ) ソフトウェアコントロール 東京事業部 |
| 3 位 | ていくいっといーじー | 東海大学専門職大学院 組込み技術研究科 |
| 順位 | チーム名 | 所属 |
|---|---|---|
| 1 位 | HASH UFO | ( 株 ) 日立製作所 日立研究所 |
| 2 位 | ハマロボ | リコーITソリューションズ エンベデッドソリューション事業部 |
| 3 位 | StrayCab06 | ( 株 ) ソフトウェアコントロール 東京事業部 |
| 順位 | チーム名 | 所属 |
|---|---|---|
| 1 位 | 追跡線隊ICS レッド | ( 株 ) 日立情報制御ソリューションズ |
| 2 位 | HASH UFO | ( 株 ) 日立製作所 日立研究所 |
| 3 位 | i468 | ( 株 ) 富士通コンピュータテクノロジーズ 長野事業所 |
| 順位 | チーム名 | 所属 |
|---|---|---|
| 1 位 | チームSUPRAパンダ | ( 株 ) 日立超LSIシステムズ |
| 2 位 | リターン オブ タムラ | 早稲田大学 基幹理工学研究科 情報理工学専攻 鷲崎研究室 |
| 3 位 | 芝浦雑伎団 | ( 株 ) オージス総研 組み込みソリューション部 |
| 順位 | チーム名 | 所属 |
|---|---|---|
| 1 位 | 田町レーシング | ( 株 ) オージス総研 組み込みソリューション部 |
| 2 位 | チームSUPRAパンダ | ( 株 ) 日立超LSIシステムズ |
| 3 位 | リターン オブ タムラ | 早稲田大学 基幹理工学研究科 情報理工学専攻 鷲崎研究室 |
| 順位 | チーム名 | 所属 |
|---|---|---|
| 1 位 | 芝浦雑伎団 | ( 株 ) オージス総研 組み込みソリューション部 |
| 2 位 | チームSUPRAパンダ | ( 株 ) 日立超LSIシステムズ |
| 3 位 | 松浦Lab | 芝浦工業大学ソフトウェア工学研究室 |
筆者の主催する東京連合 ( ET ロボコン東京地区コミュニティ活動 ) に参加するチームの結果 ( スペースの都合、入賞チームのみ ) も紹介します。
A ブロック ( 1 日目 )
B ブロック ( 2 日目 )
東京連合のチーム数が 10 あまり ( 東京地区のみ )、東京地区全体 ( 82チーム ) の 1/8 程であることを踏まえると、十分に満足のいく結果でした。特に、両ブロック合わせ 4 チームが入賞したモデル部門での活躍が目立ちました。合同モデルレビューなどを通し、チームの垣根を越えて切磋琢磨したこともその要因ではないかと思います。一方、競技部門については、残念ながらベーシックステージを完走できなかったチームもあり、リスク分析の強化など課題の見えた大会でした。
チャンピオンシップ大会は、11 月 16 日 ( 水 )、17 日 ( 木 ) にパシフィコ横浜で開催されます。最上位大会であることから、果敢にチャレンジするチームが多く、地区大会を超える熱戦が予想されます。ぜひ会場に足を運び、その熱さに触れてみてください。
また大会の様子や結果については、レポート記事として紹介する予定です。
| © 2011 OGIS-RI Co., Ltd. |
|