本連載では「Jetson Nano」を使ったAI自律走行車「JetBot」(公式Wiki)について紹介しています。第1回ではJetBotの部品の調達から実際に動かしてデモの障害物回避の学習を行うまでの全体の流れを紹介しました。2回目となる今回はJetBotの詳しい組み立て手順(ハードウェアのセットアップ)を、気を付けるべきポイントなどと共に紹介していきます。
ハードウェアのセットアップ
以下の順に説明します。
- 必要な部品一覧(再掲)
- 組み立て用品
- 組み立て工程
1. 必要な部品一覧(再掲)
基本は公式Wikiの部品リストで指定されているものを購入します。しかし日本国内で流通していない部品が一部存在するため、その場合はなるべく仕様が近く、かつ日本国内で購入できる部品を選定しました。今回JetBotを作るに当たって購入した部品一覧は以下の通りとなります。(価格は2019年4月24日時点のものです)
- 下記部品一覧は以下の記事で公開されているものを参考にしています。
公式Wikiの部品リスト:https://github.com/NVIDIA-AI-IOT/jetbot/wiki/bill-of-materials
国内で調達可能な部品リスト: https://qiita.com/lekto/items/39d7de950ce1083a1774
| 部品名 | 商品名 | URL | 価格(¥) | 個数 | 公式仕様 |
|---|---|---|---|---|---|
| Camera | Raspberry Pi Camera Module V2 | Amazonで買う | 2,799 | 1 | ✔ |
| Camera lens attachment | Raspberry Pi Camera Module V2用160度FoVレンズ | Amazonで買う | 3,800 | 1 | ✔ |
| Motor、Wheels | HiLetgo 2個セット(プラスチックタイヤホイール、DC 3-6Vギアモーター) | Amazonで買う | 760 | 1 | |
| Motor Driver | DC MOTOR + STEPPER FEATHERWING A | マルツで買う | 2,615 | 1 | ✔ |
| Micro SD card | Transcend マイクロSDカード 128GB | Amazonで買う | 2,780 | 1 | |
| USB cable pack | Rerii 右向き両端L型 マイクロUSBケーブル | Amazonで買う | 799 | 1 | ✔ |
| USB cable pack | Rerii 左向き両端L型 マイクロUSBケーブル | Amazonで買う | 799 | 1 | ✔ |
| Battery | INIU モバイルバッテリー 10000mAh |
Amazonで買う |
1,999 |
1 | |
| Caster ball | 樹脂ボール(ジュラコン)(インチサイズ) | モノタロウで買う | 359 | 1 | ✔ |
| PiOLED display | ADAFRUIT PIOLED - 128X32 MONOCHR | マルツで買う | 1,959 | 1 | ✔ |
| PiOLED header | uxcell ピンヘッダー(2.54mmピッチ、2x20、40ピン ライトアングル) | Amazonで買う | 839 | 1 | ✔ |
| WiFi Dongle | BUFFALO WLI-UC-GNM2S | Amazonで買う | 1,144 | 1 | |
| 合計金額 | 24,152 |
*※公式Wikiで推奨されているバッテリーが国内で購入できるようになったため、バッテリーの項目に追記しています。
また、下記の部品は公式のGithubで公開されているモデルデータを使って、3Dプリンタで出力します。ちなみに購入したホイールの径が65mmのため、モデルデータも65mm用のものを使用しています。
| 部品名 | URL | 個数 |
|---|---|---|
| Chassis | chassis.stl | 1 |
| Camera Mount | camera_mount.stl | 1 |
| Caster base | caster_base_65mm.stl | 1 |
| Caster shroud | caster_shroud_65mm.stl | 1 |
2. 組み立て用品
前述の部品以外に、ハードウェアを組み立てるために必要な部品は下記の通りです。
| 部品名 | 個数 | 参考購入先 | 備考 | 公式仕様 |
|---|---|---|---|---|
| 両面テープ | 2 | Amazonで買う | バッテリー固定用。但し今回はバッテリーのサイズが大きいため固定しなくとも問題がなかった | ✔ |
| M2ネジ | 20 | Amazonで買う | 8mm長、セルフタッピングネジ | ✔ |
| M3ネジ | 4 | Amazonで買う | 25mm長 | ✔ |
| M3ナット | 4 | Amazonで買う | ✔ | |
| ジャンパワイヤ(メス-メス) | 4 | Amazonで買う | 20cm以下。筆者は20cmのものを使用しました | ✔ |
| ジャンパワイヤ(片側オス) | 4 | Amazonで買う | モーターの配線用 |
また、工具類は下記のものを使用しました
- ラジオペンチ
- ニッパ
- ワイヤストリッパー
- ドライバー
- はんだ及びはんだこて
- やすり

3. 組み立て工程
公式WikiのHardware Setupの手順に沿って、実際に組み立てた工程を紹介します。今回の組み立ては公式Wikiを参照しながら手探りの状態での組み立てで、掛かった日数は1.5日になります。電子工作初心者が取り組んだにしてはそれほど時間が掛からなかったと思います。
3.1. 3Dプリンタで出力したパーツの清掃
3Dプリンタで出力したパーツをラフトから剥がし、ネジ穴等についているバリをヤスリで除去します。
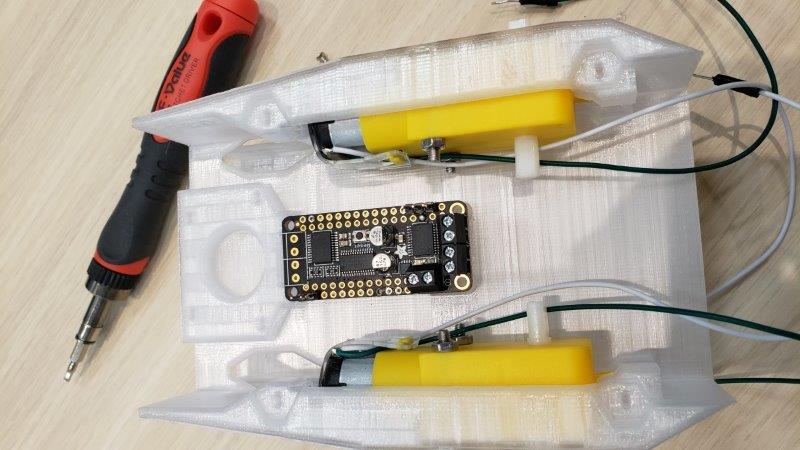
3.2. モーターの取り付け
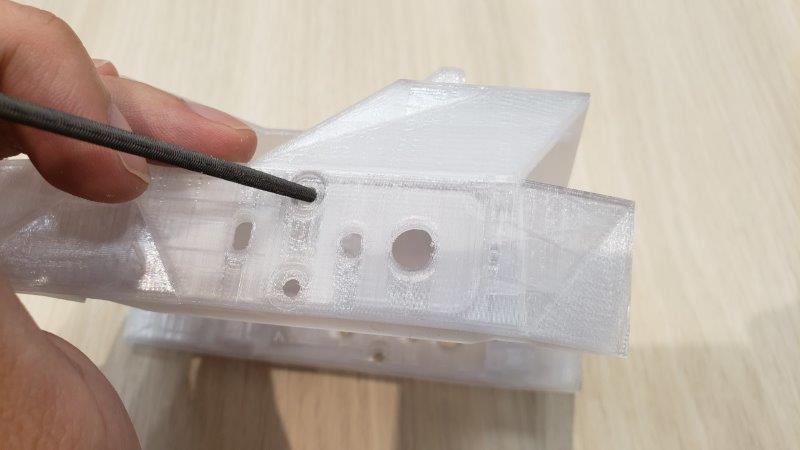
公式Wikiで指定されているモーターは既にワイヤーが付いていますが、今回購入したモーターには付いていないため、赤丸で囲んだ金具にはんだでジャンパワイヤーを付けます。


ジャンパワイヤーは片側がオスのものを使用します。もう一方は配線を剥いてはんだ付けしますので、両側がソケットになっている必要はありません。
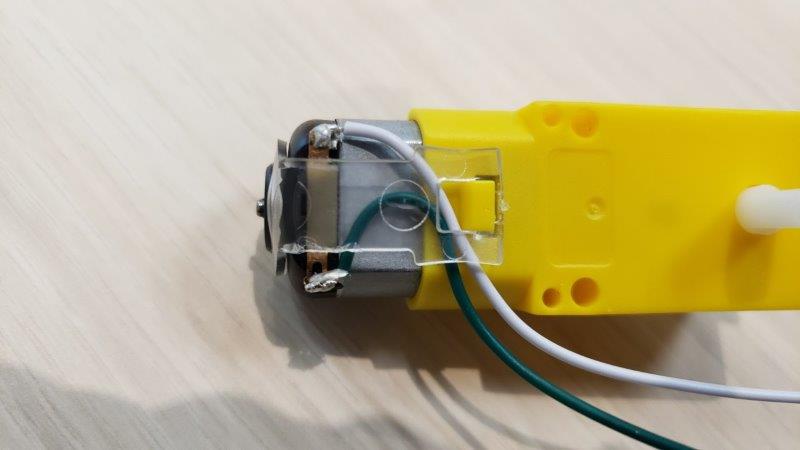
モーターは二つありますので、ワイヤーの色を電極ごとに揃えて取り付けます。取り付けたワイヤーは透明なバンドの下に通し、まとめます。
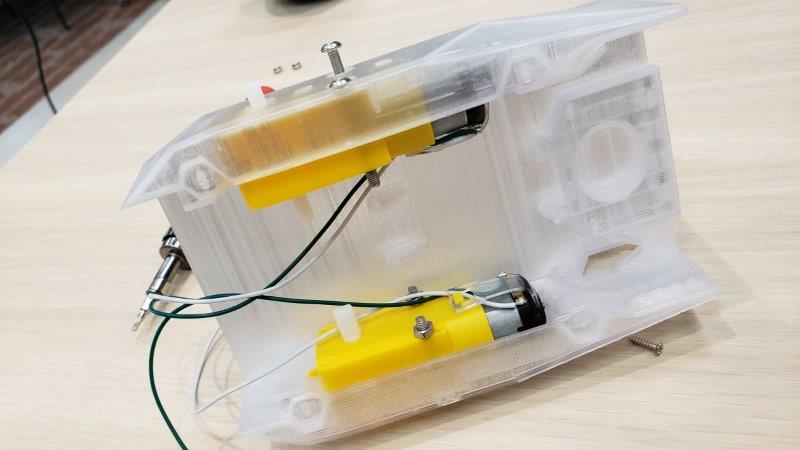
ワイヤーをモーターに取り付けたら、車体にはめ込みネジで止めます。ネジは25mm長のM3を使い、ナットで固定します。
3.3. モータードライバのはんだ付け
次はモータードライバをモーター、JetsonNano、バッテリーとつなぐために接続用の部品をはんだ付けします。

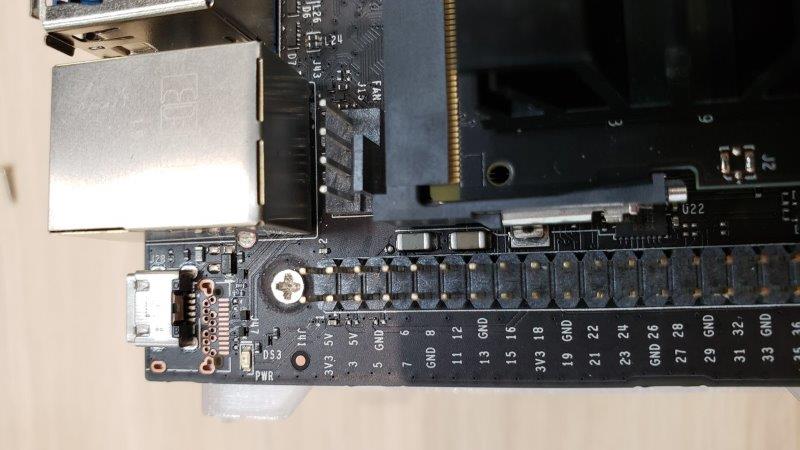
モータードライバに付属しているピンヘッダをカッターで切断し、2ピンと3ピンのヘッダを切り出します。 切り出したピンヘッダとネジ端子を写真のように差し込みます。
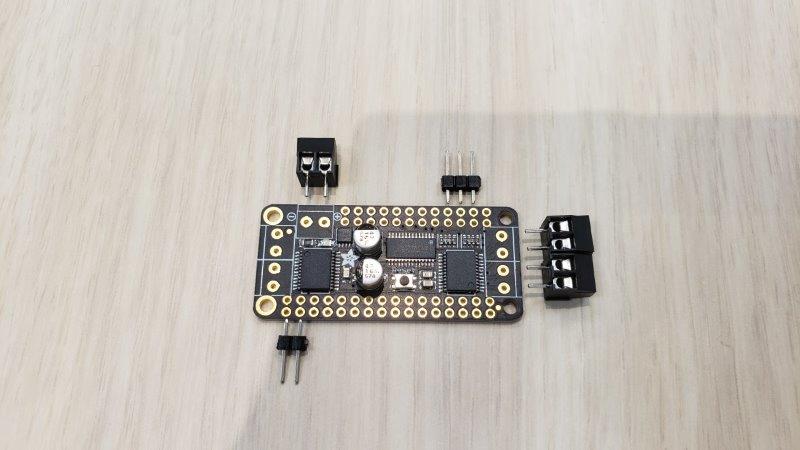

部品を差し込んだ部分の裏側を以下のようにはんだ付けします。はんだ付けの箇所は多くないので、綺麗にはできなかったものの初心者でもきちんとできる難易度でした。

3.4. モータードライバの取り付け
モータードライバを車体に取り付け、モーター及び電源とつなぎます。「Rerii 右向き両端L型 マイクロUSBケーブル」のmicroUSB端子を切って中のワイヤーを露出させます。

ケーブルの中には4本のワイヤーが入っています。このうち、緑と白はデータ転送用の線なので使いません。赤(電源線)と黒(GND線)の表面のゴムを剥いて銅線を出します。

モータードライバを写真の位置にとりつけ、ネジで固定します。
モーターからのワイヤーを4ピンネジ端子に、USBケーブルのワイヤーを2ピンネジ端子に差し込み、ネジを閉めて固定します。

モーターからのワイヤーを逆につなげるとタイヤの進行方向が逆になってしまうため、写真の通りに対応させてください。なお、公式Wikiに掲載されている画像は注意書きもある通り配線が逆になっているため注意してください。
3.5. Wi-fiドングルの取り付け
WikiではWi-fiアンテナを取り付けていましたが、こちらの記事では代わりにWi-fiドングルをJetson NanoのUSBポートに取り付けます。


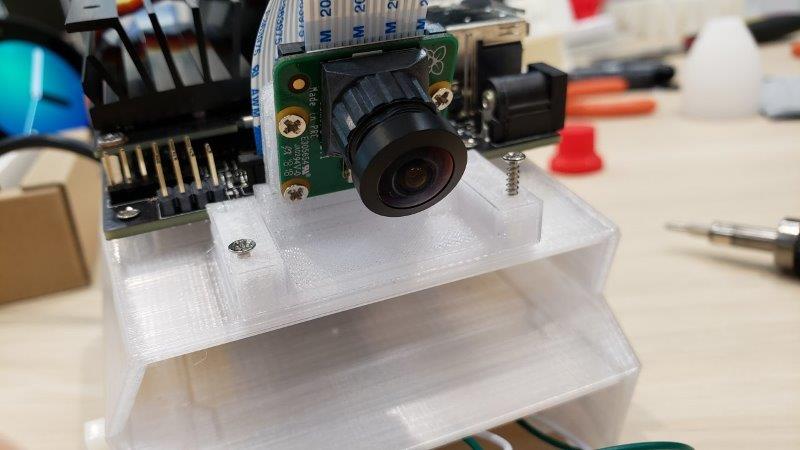
3.6. カメラの取り付け
RaspberryPiカメラにもともと付いていたカメラ部品を取り外し、広角レンズカメラと交換します。


広角レンズカメラの土台を基盤に貼り付けます。


カメラのリボンケーブルの先端をNanoに差し込みます。
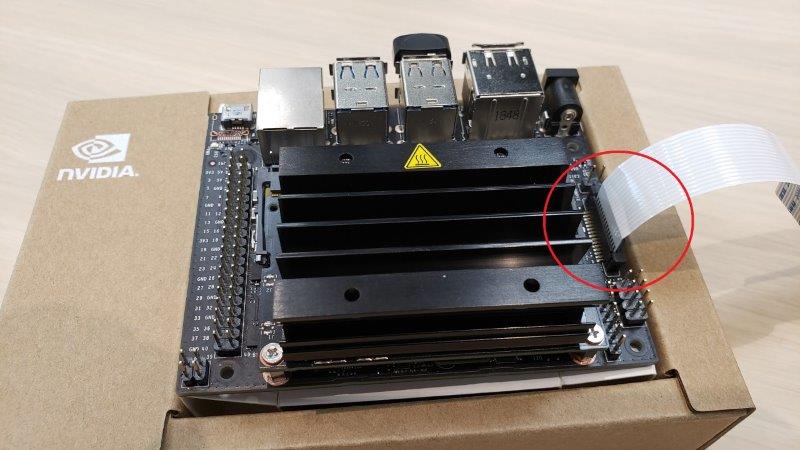
かなり差し込みにくいですが、うまく角度を合わせて奥まで差し込んでください。
3.7. Jetson Nanoの取り付け
Jetson Nano本体を車体上部に設置し、M2ネジで固定します。

3.7. カメラ台の取り付け
カメラとカメラ台を車体に取り付けます。

カメラ台を車体の前方に設置しM2ネジで取り付け、カメラをカメラ台にM2ネジで固定します。
3.8. キャスターボールの取り付け
後輪の代わりにキャスターボールを車体の後部に取り付けます。

キャスターボールをケースに入れ、上から覆いをかぶせます。


覆いを下にして車体後部の丸い部分にはめこみ、M2ネジで固定します。

3.9. PiOLEDディスプレイのヘッダ取り付け
PiOLEDディスプレイを本体やモータドライバに接続するため、ピンヘッダとワイヤーを取り付けます。

右アングルピンヘッダを3列(6ピン)のところで切り離します。

切り出したピンヘッダをPiOLEDのホールに差し込みます。ジャンプワイヤーを4本取り、ピンヘッダのもう片端に接続します。画像では隠れていますが、茶色のワイヤーは黄色のワイヤーの真下にあります。

ピンヘッダは公式Wikiでははんだ付けで固定していましたが、今回は差し込んだだけで十分に固定され、抜けそうになかったためそのまま使っています。(あまりに差込が固かったためラジオペンチで押し込みました)
3.10. モータードライバとPiOLEDディスプレイ間の配線
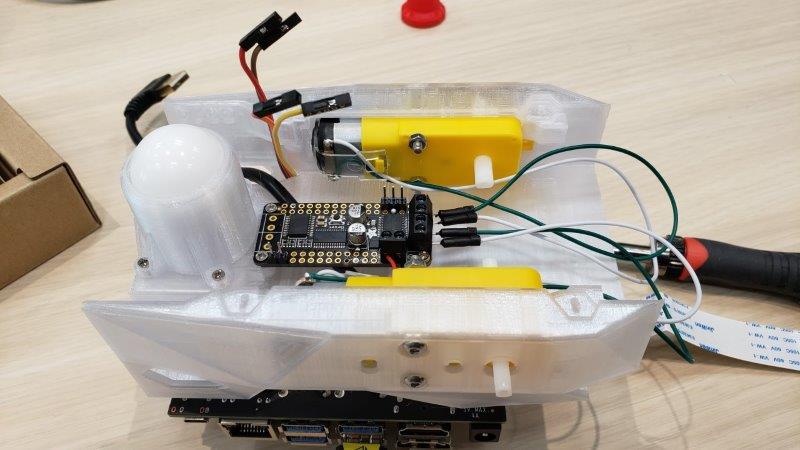
PiOLEDディスプレイをJetson Nano本体およびモータドライバに接続します。
PiOLEDをNano本体の写真の位置に取り付けます。

PiOLEDから伸ばしたジャンプワイヤーを、車体の穴を通って下部に引き込み、モータードライバのピンヘッダに写真のように差し込みます。
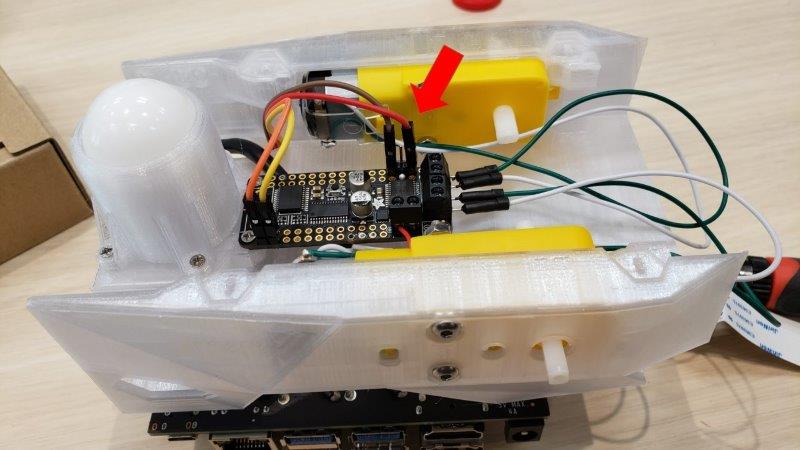
赤(3V)と茶色(GND)のワイヤーを間違えると故障につながります。必ず赤(3V)を3列ピンヘッダのネジ端子側(画像で見て3列ピンヘッダの一番右)に接続してください。
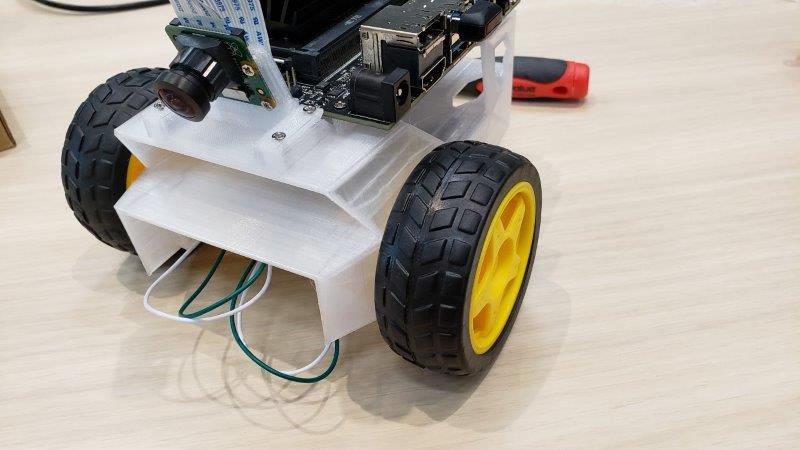
3.11. ホイールの取り付け
前輪となるホイールを車体に取り付けます。

3.12. バッテリの取り付けと配線
バッテリーを取り付け、Jetson Nano及びモータードライバと接続します。

バッテリーを車体の空洞部分に収納します。バッテリーの形が公式仕様ではないため、かなりはみ出しています。
※公式仕様のバッテリーが国内で購入できるようになりましたので、そちらの使用を推奨します。また公式仕様バッテリーの場合は、ずり落ちないようにテープ等で固定してください

こちらのバッテリーの場合、2.4Aと3AのUSBポートがひとつずつ付いています。Jetson Nanoを3A、モータドライバを2.4Aのポートに接続します。(Jetson Nanoとバッテリーの接続には「Rerii 左向き両端L型 マイクロUSBケーブル」を使用します)

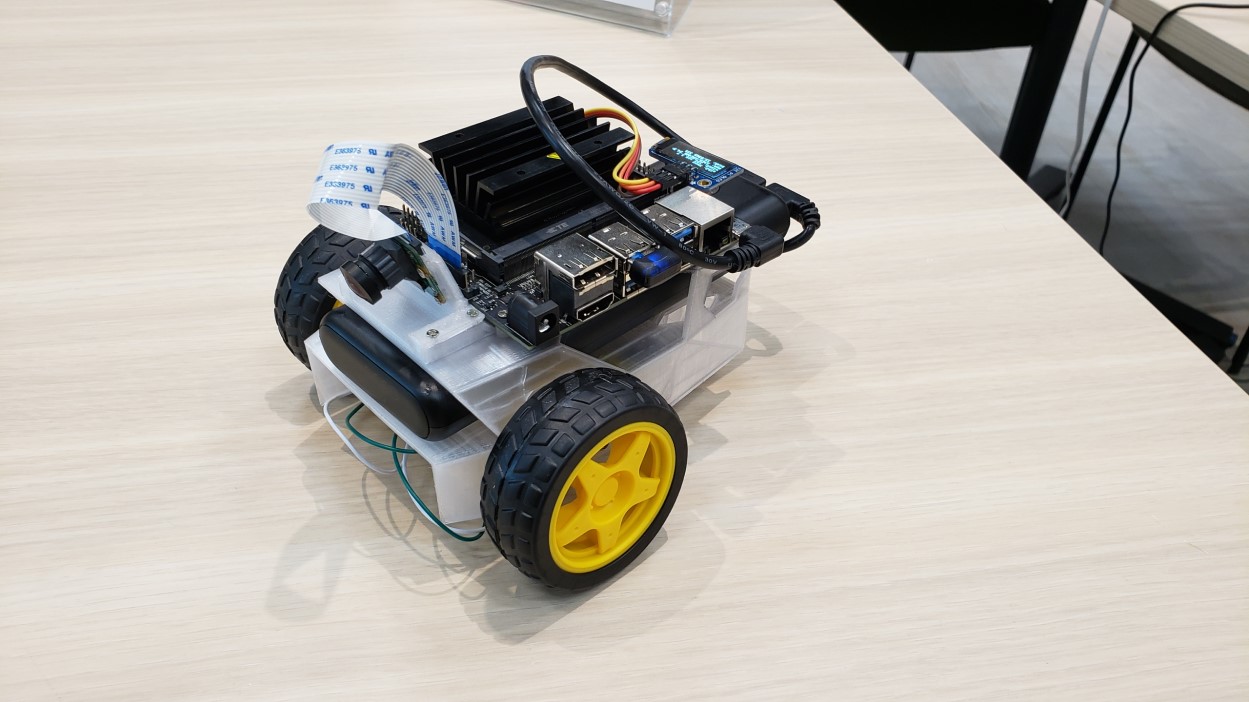
以上でJetBotの完成です。バッテリーに接続するとJetson Nanoが起動し、しばらくするとPiOLEDディスプレイにステータスが表示されます。

さいごに
今回はJetBotのハードウェアセットアップ(車体の組み立て)を、気を付けるべきポイントなどと共に紹介しました。感想として工作の難易度は高くなく、初心者でも公式Wikiに沿って組むだけで然程時間を掛けることなく完成させることができて驚いています。3Dプリンタで出力する部品は人によって調達の容易さが変わると思いますが、それ以外の部品は国内ですぐに調達できるためJetson Nanoに興味のある方、購入予定の方は是非試してみてはいかがでしょうか。